Unidad Ejecutora Doble Dependencia - Universidad Nacional de San Juan, Facultad de Ingeniería - Consejo Nacional de Investigaciones Científicas y Técnicas

Eventos
- SEMINARIO - Reconstrucción espacio-temporal de cultivos utilizando estrategias de sensado activo.
Cuándo: 21/07/2025
Horario: 11:00h
Dónde: Sala de Conferencias del Instituto de Automática
Contacto:
DISERTANTE: Ing. Sebastián Sansoni, del Instituto de Automática, FI, UNSJ-CONICET.
RESUMEN: Un desafío central en el SLAM activo es evaluar la precisión de la reconstrucción, especialmente sin una referencia perfecta. La trayectoria del agente impacta significativamente la precisión de la estimación, pero ¿cómo la optimizamos para construir mapas de alta calidad?
Este seminario, presenta los resultados de una tesis doctoral que aborda esta problemática con el desarrollo de nuevos conceptos:
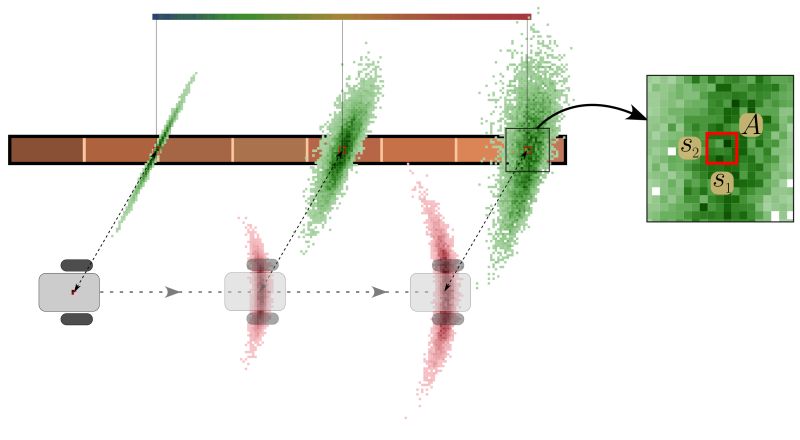
- Mapa de Incertidumbre (UM): un método novedoso para modelar la incertidumbre del mapa basado en distribuciones de probabilidad. Nos permite definir Fronteras de Incertidumbre (UF) como objetivos clave para la exploración, incluso como criterios de detención.
- Entropía Relativa Signada (SiREn): una nueva métrica basada en la divergencia KL que cuantifica tanto la cobertura como la incertidumbre con un único parámetro interpretable.
- El enfoque es compatible con múltiples sensores (cámaras, LiDARs, fusión de sensores) e independiente del backend SLAM específico utilizado, lo que permite una amplia aplicabilidad.
Estas estrategias permiten que los agentes exploren autónomamente espacios abiertos, logrando un comportamiento no observado comúnmente en la literatura de Active SLAM, contribuyendo a sistemas más robustos, interpretables y eficientes.