Unidad Ejecutora Doble Dependencia - Universidad Nacional de San Juan, Facultad de Ingeniería - Consejo Nacional de Investigaciones Científicas y Técnicas

Eventos
- SEMINARIO - Sistema de Navegación Inteligente utilizando Inteligencia Artificial
Cuándo: 21/05/2026
Horario: 11hs
Dónde: Sala de Conferencias del Instituto de Automática
Contacto:
DISERTANTE: Ing. Jeremías Gaia Amorós, del Instituto de Automática, Facultad de Ingeniería, UNSJ.
RESUMEN: En este seminario previo a la defensa oral de su tesis doctoral, el Ing. Gaia presentará el trabajo desarrollado durante sus años de formación.
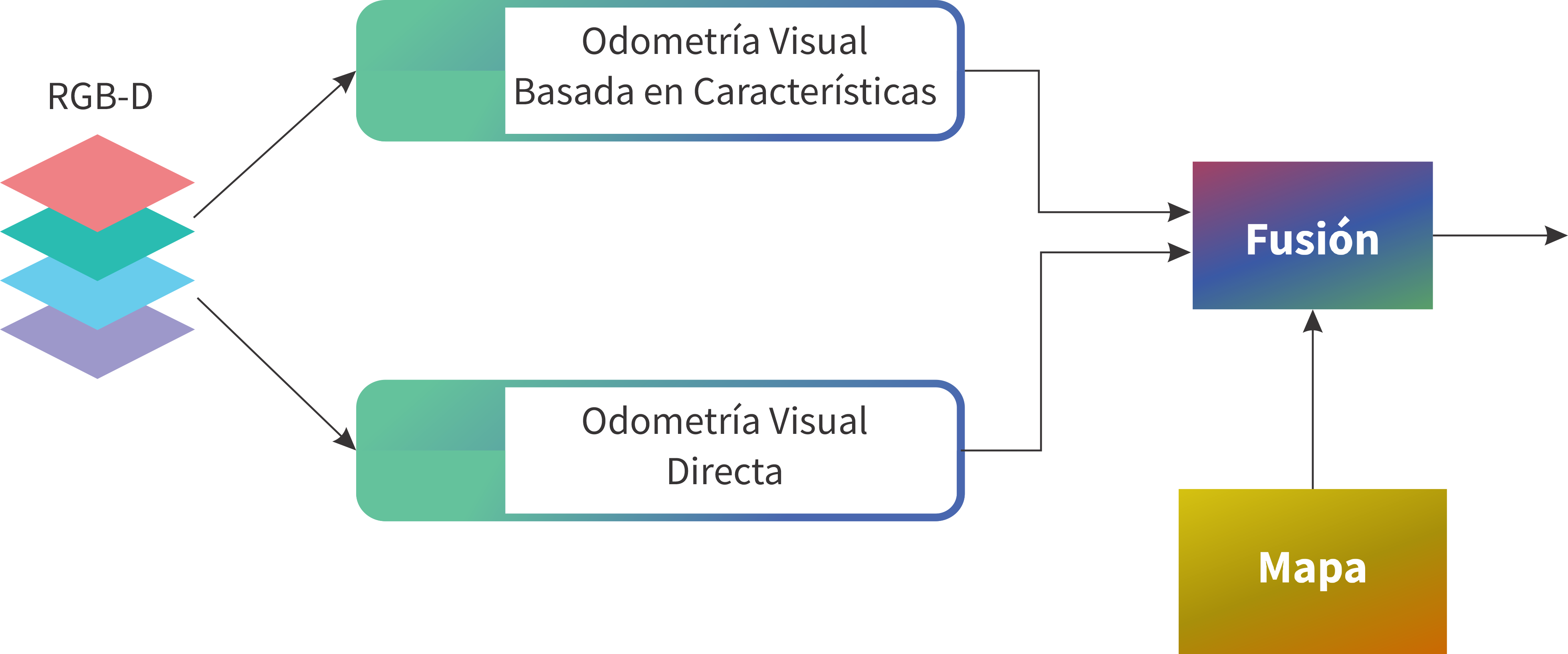
La tesis desarrolla un sistema de localización inteligente que utiliza la fusión sensorial para mejorar la estimación de la pose de un agente (ej: un robot móvil o una persona) utilizando la información de una cámara RGB-D. El método combina los datos de dos sistemas de odometría visual complementarios, incorporando directamente la incertidumbre de cada fuente para mejorar la estimación final de la pose.
Las contribuciones incluyen: i) el diseño de una arquitectura modular de fusión que permita mejorar las estimas individuales de los sistemas de odometría visual y evite la pérdida de localización en escenarios en los que cada uno de ellos es propenso al fallo. ii) Una metodología basada en inteligencia artificial para encontrar el valor de píxeles no estimados en el mapa de profundidad, iii) El desarrollo de una estrategia de selección de píxeles para estimación visual de la pose diseñado en base a descriptores locales de textura, y iv) un esquema de asignación de ganancias automático basado en incertidumbre, que permite adaptar el comportamiento general del sistema al entorno por el que se navega